kategorier: Utvalda artiklar » Praktisk elektronik
Antal visningar: 162,237
Kommentarer till artikeln: 4
Hur man gör ett gör-det-själv-relä
 Vad är en tidsrelä? Handlingsalgoritm tidsrelä enkelt nog, men ibland kan det orsaka beundran. Om vi minns de gamla tvättmaskinerna, som kärleksfullt kallades "skopan med en motor", var timerns verkan mycket tydlig: de vände på ratten några få fästingar, något började ficka inuti, och motorn startade.
Vad är en tidsrelä? Handlingsalgoritm tidsrelä enkelt nog, men ibland kan det orsaka beundran. Om vi minns de gamla tvättmaskinerna, som kärleksfullt kallades "skopan med en motor", var timerns verkan mycket tydlig: de vände på ratten några få fästingar, något började ficka inuti, och motorn startade.
Så snart handtagspekaren nådde uppdelningen av noll skala slutade tvätten. Senare dök bilar med två tidtagare - tvätt och snurr. I sådana maskiner gjordes tidsreläerna i form av en metallcylinder, i vilken klockmekanismen var dold, och utanför fanns det bara elektriska kontakter och en kontrollvred.
Moderna tvättmaskiner - automatmaskiner (med elektronisk styrning) har också ett tidsrelä, och det blev omöjligt att göra det som ett separat element eller en del på styrkortet. Alla tidsförseningar erhålls programmatiskt med hjälp av kontrollmikrokontrollern. Om du tittar noga på den automatiska tvättmaskinens cykel kan antalet tidsförseningar helt enkelt inte räknas. Om alla dessa tidsförseningar utfördes i form av en klockmekanism för de ovannämnda, skulle det helt enkelt inte vara tillräckligt med utrymme i tvättmaskinhuset.
Tidsrelä de används inte bara i tvättmaskiner, till exempel i mikrovågsugnar, med hjälp av tidsförseningar regleras inte bara driftstiden utan också värmekraften. Detta görs enligt följande: RF-spänningen slås på i 5 sekunder och stängs av i 5. I detta fall är den genomsnittliga värmeeffekten 50%. För att få 30% effekt är det nog att slå på RF-enheten i 3 sekunder. Följaktligen är högfrekvenslampan i avstängt läge i 7 sekunder. Naturligtvis kan dessa siffror vara olika, till exempel 50 och 50 eller 30 och 70, just här visas förhållandet mellan avstängningstiden för HF.
Omnämnande av gamla tvättmaskiner ges av en anledning. Det är här, i det här exemplet kan du se, till och med känna med dina händer, hur tidsreläet fungerar.
Att vrida veven medurs är inget annat än en slutartid. Ställdonet (elmotorn) slås omedelbart på. Slutarhastigheten, i detta fall på några minuter, bestämmer handtagets rotationsvinkel. Således utförs två åtgärder på en gång: laddar exponeringstiden och startar själva tidsfördröjningen. Efter att den inställda tiden har gått, stängs ställdonet av. Alla tidsreläer eller tidtagare fungerar till och med ungefär, även de som är dolda inuti mikrokontroller (MK).
Från urverk till elektronik
Hur man får en tidsfördröjning med MK
Hastigheten på modern MK är mycket hög, upp till flera tiotals mips (miljoner operationer per sekund). Det verkar som om inte så länge sedan var det en kamp för 1 mippor på persondatorer. Nu till och med föråldrade MK: er, till exempel 8051-familjen, kan enkelt uppfylla denna 1 mips. Således kommer det att ta exakt en sekund att slutföra 1 000 000 operationer.
Här, en till synes färdigt lösning, hur man får en tidsfördröjning. Utför bara samma operation en miljon gånger. Detta kan göras helt enkelt om den här operationen är loopad i programmet. Men problemet är att förutom denna operation kan MK för en sekund inte göra något annat. Här har du prestationen av teknik, här har du möss! Och om du behöver en slutartid på flera tiotals sekunder eller minuter?
Timer - en enhet för att räkna tid
För att förhindra en sådan förlägenhet, värmde processorn inte upp precis så, genomföra ett onödigt kommando som inte skulle göra något användbart, timers byggdes in i MK, som regel flera av dem.Om du inte går in på detaljer är timern en binär räknare som räknar pulserna som genereras av en speciell krets inuti MK.
I MK-familjen 8051 genereras till exempel en räknepuls när varje kommando utförs, d.v.s. timern räknar helt enkelt antalet utförda maskininstruktioner. Under tiden är den centrala processorenheten (CPU) tyst engagerad i genomförandet av huvudprogrammet.
Anta att timern börjar räkna (det finns ett motstartkommando för detta) från noll. Varje puls ökar innehållet i räknaren med en och når slutligen det maximala värdet. Därefter återställs innehållet i räknaren. Det här ögonblicket kallas ”counter overflow”. Det är just slutet av tidsfördröjningen (kom ihåg tvättmaskinen).
Anta att timern är 8-bitars, då kan den användas för att beräkna ett värde i intervallet 0 ... 255, annars räknar räknaren över varje 256 pulser. För att göra slutartiden kortare räcker det att starta räkningen inte från början, utan från ett annat värde. För att få det räcker det att först ladda detta värde i räknaren och sedan starta räknaren (kom igen ihåg tvättmaskinen). Detta förinstallerade nummer är rotationsvinkeln för tidsreläet.
En sådan timer med en arbetsfrekvens på 1 mips gör att du kan få en slutartid på högst 255 mikrosekunder, men du behöver några sekunder eller till och med minuter, vad ska du göra?
Det visar sig att allt är ganska enkelt. Varje timeröverskridning är en händelse som gör att huvudprogrammet avbryts. Som ett resultat byter CPU till motsvarande subrutin, vilket av sådana små utdrag kan lägga till valfri, åtminstone upp till flera timmar och jämna dagar.
Avbrottstjänstrutinen är vanligtvis kort, inte mer än några dussin kommandon, varefter det återgår till huvudprogrammet, som fortsätter att köras från samma plats. Prova detta utdrag genom en enkel upprepning av kommandona som det sades ovan! Även om du i vissa fall måste göra just det.
För att göra detta finns det ett NOP-kommando i processorkommandosystemen, som bara gör ingenting, det tar bara maskintid. Det kan användas för att reservera minne, och när du skapar tidsförseningar, bara mycket korta, i storleksordningen några mikrosekunder.
Ja, läsaren kommer att säga hur han led! Från tvättmaskiner direkt till mikrokontroller. Och vad var det mellan dessa extrema punkter?
Vad är tidsreläer?
Som redan nämnts Tidsreläets huvuduppgift är att erhålla en fördröjning mellan insignalen och utsignalen. Denna fördröjning kan genereras på flera sätt. Tidsreläerna var mekaniska (redan beskrivna i början av artikeln), elektromekaniska (även baserade på ett urverk, endast fjädern lindas av en elektromagnet), liksom med olika dämpningsanordningar. Ett exempel på ett sådant relä är den pneumatiska tidsomkopplaren som visas i figur 1.

bild 1. Pneumatisk tidsrelä.
Reläet består av en elektromagnetisk drivenhet och en pneumatisk redskap. Reläspolen finns vid driftspänningar på 12 ... 660V AC (16 totalvärden) med en frekvens på 50 ... 60Hz. Beroende på reläversionen kan slutarhastigheten starta antingen när den utlöses eller när den elektromagnetiska drivenheten släpps.
Tiden ställs in av en skruv som reglerar tvärsnittet i hålet för luft att gå ut ur kammaren. De beskrivna tidsreläerna skiljer sig åt i inte särskilt stabila parametrar, varför elektroniska tidsreläer alltid används, där det är möjligt. För närvarande kan sådana reläer, både mekaniska och pneumatiska, kanske bara hittas i gammal utrustning, som ännu inte har ersatts av modern utrustning, och till och med i ett museum.
Elektroniska tidsreläer
Kanske en av de vanligaste var VL-60 ... 64-reläserien och några andra, till exempel VL-100 ... 140-reläer.Alla dessa timers byggdes på ett specialiserat chip KR512PS10. Utseendet på reläet för luftledningen visas i figur 2.

Bild 2. Tidsreläserien VL.
Kretsen för VL - 64 tidsreläet visas i figur 3.

Figur 3 Timerns schema VL - 64
När en spänning matas till ingången via likriktarbron VD1 ... VD4, matas spänningen genom stabilisatorn på KT315A-transistorn till DD1-chipet, vars inre generator börjar generera pulser. Pulsernas frekvens regleras av en variabel motstånd PPB-3B (det är den som visas på reläets frontpanel), i serie ansluten med en 5100 pF-tidskondensator, som har en tolerans på 1% och en mycket liten TKE.
De mottagna pulserna räknas med en räknare med en variabel delningskoefficient, som ställs in genom att växla terminalerna på mikrokretsen M01 ... M05. I VL-seriens relä utfördes denna växling från fabriken. Det maximala fördelningsförhållandet för hela räknaren når 235 929 600. Enligt dokumentationen för mikrokretsen, vid en frekvens av masteroscillatorn 1 Hz, kan slutarhastigheten nå mer än 9 månader! Enligt utvecklarna är detta tillräckligt för alla applikationer.
Pin 10 på END-chipet är slutet på slutartiden, ansluten till ingång 3 - ST start - stopp. Så snart en hög nivå spänning visas vid END-utgången, stoppar pulsräkningen, och en hög nivå spänning visas på den 9: e utgången från Q1, som kommer att öppna KT605-transistorn och reläet anslutet till KT605-kollektorn kommer att lösa ut.
Moderna tidsreläer
Som regel görs på MK. Det är lättare att programmera en färdig egen mikrokrets, lägga till några knappar, en digital indikator, än att hitta något nytt och sedan också göra finjustering av tiden. Ett sådant relä visas i figur 4.

Figur 4 Mikrokontrollers tidsrelä
Varför gör en-det-själv-relä?
Och även om det finns ett så stort antal tidsväxlar, nästan för varje smak, ibland hemma måste du göra något eget, ofta mycket enkelt. Men sådana mönster motiverar ofta sig helt och fullt. Här är några av dem.
Så snart vi just har undersökt funktionen av mikrokretsen KR512PS10 som en del av reläet för luftledningen, måste vi börja överväga amatörkretsar från det. Figur 5 visar timerkretsen.

Bild 5. Timer på mikrokretsen KR524PS10.
Mikrokretsen drivs från den parametriska stabilisatorn R4, VD1 med en stabiliseringsspänning på cirka 5 V. Vid tidpunkten för uppstart genererar R1C1-kretsen en mikrocircuit-återställningspuls. Detta startar den interna generatorn, vars frekvens ställs in av R2C2-kedjan och den interna räknaren för mikrokretsen startar pulsantalet.
Antalet av dessa pulser (motdelningsförhållandet) ställs in genom att växla terminalerna på mikrokretsen M01 ... M05. Med det läge som anges i diagrammet kommer denna koefficient att vara 78643200. Detta antal pulser utgör signalens hela period vid END-utgången (stift 10). Stift 10 är anslutet till stift 3 ST (start / stopp).
Så snart slututgången är inställd på en hög nivå (en halv period har räknats) stannar räknaren. Samtidigt sätter utgången Q1 (stift 9) också en hög nivå, vilket öppnar transistorn VT1. Genom en öppen transistor slås relä K1 på, som styr lasten med sina kontakter.
För att starta tidsfördröjningen räcker det att stänga av reläet kort igen och på. Tidsdiagrammet för END- och Q1-signalerna visas i figur 6.

Bild 6. Tidschema över END- och Q1-signaler.
Med värdena på R2C2-tidskedjan som visas på diagrammet är generatorfrekvensen cirka 1000 Hz. Därför är tidsfördröjningen för den indikerade anslutningen av terminalerna M01 ... M05 cirka tio timmar.
För att finjustera denna slutartid bör följande göras. Anslut terminalerna M01 ... M05 till läget "Seconds_10", som visas i tabellen i figuren 7.
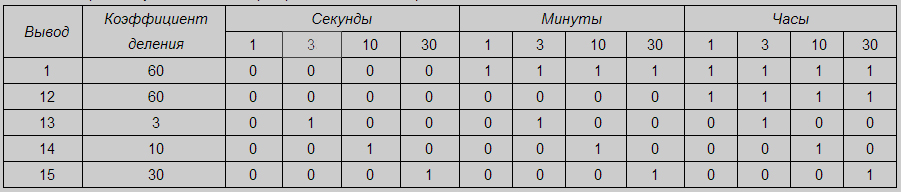
Bild 7. Tabell för inställning av timer (klicka på bilden för att förstora).
Med den här anslutningen, vrid det variabla motståndet R2 för att justera slutartiden i 10 sekunder. med stoppur. Anslut sedan plintarna M01 ... M05, som visas i diagrammet.
Ett annat diagram på KR512PS10 visas i figur 8.

Figur 8 Relä för chiptid KR512PS10
En annan timer på KR512PS10-chipet.
Till att börja med uppmärksammar vi KR512PS10, mer exakt, END-signalerna, som inte visas alls, och ST-signalen, som helt enkelt är ansluten till en gemensam tråd, vilket motsvarar en logisk nollnivå.
Med denna påslagning kommer inte räknaren att stanna, som visas i figur 6. END- och Q1-signalerna fortsätter cykliskt, utan att stoppa. Formen på dessa signaler kommer att vara ett klassiskt slingrande. Således visade sig det bara en generator med rektangulära pulser, vars frekvens kan styras av ett variabelt motstånd R2, och motdelningsfaktorn kan ställas in enligt tabellen som visas i figur 7.
Kontinuerliga pulser från utgången Q1 går till räkneingången för decimaldiskavkodaren DD2 K561IE8. R4C5-kedjan återställer räknaren till noll när den är påslagen. Som ett resultat visas en hög nivå vid utgången från avkodaren "0" (stift 3). Vid utgångar 1 ... 9 låga nivåer. Med ankomsten av den första räknepulsen flyttas en hög nivå till utgången "1", den andra pulsen ställer in en hög nivå vid utgången "2" och så vidare, upp till utgången "9". Sedan rinner räknaren över och räkningscykeln börjar på nytt.
Den resulterande styrsignalen genom omkopplaren SA1 kan matas till ljudgeneratorn på elementen DD3.1 ... 4 eller till reläförstärkaren VT2. Tidsfördröjningen beror på läget för omkopplaren SA1. Med terminalanslutningarna M01 ... M05 som visas på diagrammet och parametrarna för R2C2-tidskedjan är det möjligt att erhålla tidsförseningar som sträcker sig från 30 sekunder till 9 timmar.
Boris Aladyshkin
Se även på elektrohomepro.com
: