kategorier: Utvalda artiklar » Hemmautomation
Antal visningar: 149188
Kommentarer till artikeln: 5
Funktionsprincipen och grunderna för PLC-programmering
Programmerbara logikregulatorer (PLC)
 Före tillkomsten av solid-state logiska kretsar var utvecklingen av logiska styrsystem baserade på elektromekaniska reläer. Till denna dag är reläerna inte föråldrade i sin destination, men i vissa av sina tidigare funktioner ersätts de ändå av en kontroller.
Före tillkomsten av solid-state logiska kretsar var utvecklingen av logiska styrsystem baserade på elektromekaniska reläer. Till denna dag är reläerna inte föråldrade i sin destination, men i vissa av sina tidigare funktioner ersätts de ändå av en kontroller.
I modern industri finns det ett stort antal olika system och processer som kräver automatisering, men nu är sådana system sällan utformade från reläer. Moderna produktionsprocesser behöver en enhet som är programmerad för att utföra olika logiska funktioner. I slutet av 1960-talet utvecklade det amerikanska företaget Bedford Associates en datorenhet som heter MODICON (Modular Digital Controller). Senare blev enhetens namn namnet på enheten i företaget som designade, tillverkade och sålde den.
Andra företag utvecklade sina egna versioner av den här enheten och till slut blev den känd som PLC, eller programmerbar logikregulator. Målet med en programmerbar styrenhet som kan simulera driften av ett stort antal reläer var att ersätta elektromekaniska reläer med logiska element.
PLC har en uppsättning ingångar som du kan övervaka status för sensorer och switchar. Det finns också utgångar som ger en "hög" eller "låg" signal till effektindikatorer, magnetventiler, kontaktorer, små motorer och andra självövervakande enheter.
PLC: er är lätta att programmera eftersom deras programmeringsspråk liknar logiken för ett relä. Så en vanlig industrielektriker eller en elektrotekniker som är vana vid att läsa stege-logikkretsar kommer att känna sig bekväma när man programmerar en PLC för att utföra samma funktioner.
Signalanslutning och standardprogrammering är något annorlunda för olika PLC-modeller, men de är ganska lika, vilket gör att du här kan placera en ”allmän” introduktion till programmeringen av denna enhet.
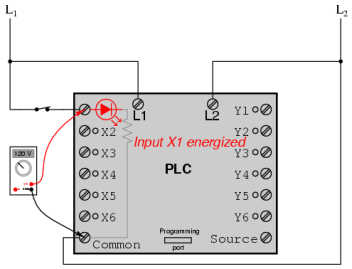
Följande illustration visar en enkel PLC, eller snarare, hur det kan se ut framför. Två skruvplintar för anslutning av interna PLC-kretsar upp till 120 VAC är märkta L1 och L2.
Sex skruvplintar på vänster sida ger anslutning för ingångsenheter. Varje terminal representerar sin ingångskanal (X). Skruvterminalen (”allmän” anslutning) som finns i det nedre vänstra hörnet är vanligtvis ansluten till L2 (neutral) strömkälla med en spänning på 120 V AC.

Inuti PLC-höljet som ansluter varje ingångsanslutning till en gemensam terminal finns det en enhetsisolator (LED) som tillhandahåller en elektriskt isolerad “hög” signal för datorkretsen (en fototransistor tolkar LED-ljuset) när en 120-volts växelström installeras mellan motsvarande ingångsstation och den gemensamma ingången terminal. LED på framsidan av PLC gör det möjligt att förstå vilken ingång som är live:
Utgångssignalerna genereras av PLC-datorkretsar, aktiverar en omkopplingsanordning (transistor, tyristor eller till och med ett elektromekaniskt relä) och ansluter “Source” -terminalen (nedre högra hörnet) till varje utgång som är märkt med en bokstav Y. Källterminalen är vanligtvis associerad med L1. Precis som varje ingång är varje utgång som är aktiverad markerad med en LED:
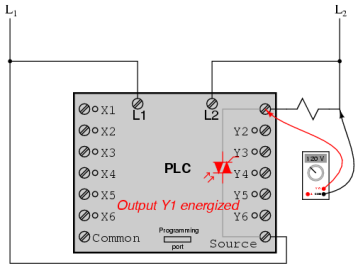
Således kan PLC anslutas till alla enheter, till exempel omkopplare och elektromagneter.
Grunder för PLC-programmering
Styrsystemets moderna logik installeras i PLC genom ett datorprogram.Detta program bestämmer vilka utgångar som är live och under vilka ingångsförhållanden. Även om själva programmet liknar en relälogisk krets finns det inga switchkontakter eller reläspolar som arbetar inuti PLC för att skapa anslutningar mellan ingång och utgång. Dessa kontakter och spolar är imaginära. Programmet skrivs och ses med en persondator ansluten till PLC-programmeringsporten.
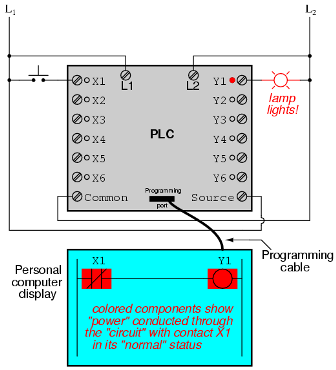
Tänk på följande krets- och PLC-program:
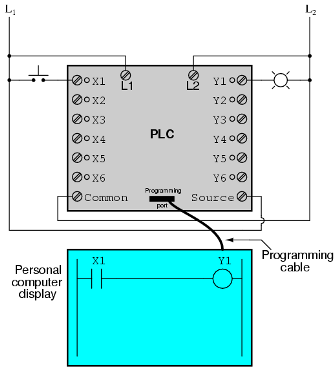
När tryckknappen inte är aktiverad (i off-läge) skickas inte signalen till ingång X1. I enlighet med programmet, som visar den "öppna" ingången X1, kommer inte signalen att sändas till utgången Y1. Således kommer utgången Y1 att förbli frånkopplad och indikatorn ansluten till den kommer att stängas av.
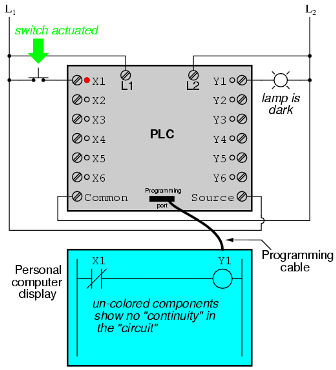
Om man trycker på tryckknappen kommer signalen att skickas till ingång X1. Alla kontakter X1 i programmet kommer att anta ett aktiverat tillstånd, som om det är reläkontakter som aktiveras genom att mata spänning till en reläspole som kallas X1. I detta fall kommer den öppna kontakten X1 att vara "stängd" och skicka en signal till spolen Y1. När spolen Y1 är aktiverad tänds utgången Y1 med en lampa ansluten till den.
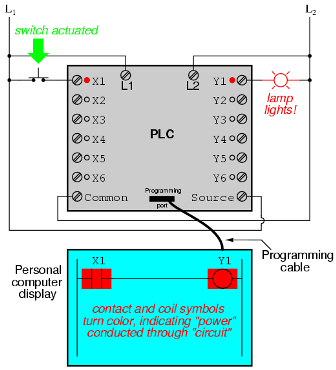
Det bör förstås att kontakt X1 och spole Y1 är anslutna med ledningar, och "signalen" som visas på datorskärmen är virtuell. De finns inte som riktiga elektriska komponenter. De finns bara i ett datorprogram - en del av programvaran - och liknar bara vad som händer i reläkretsen.
Det är lika viktigt att förstå att den dator som används för att skriva och redigera programmet inte behövs för ytterligare användning av PLC. Efter att programmet har laddats ner till den programmerbara styrenheten kan datorn stängas av och PLC kommer oberoende att utföra programkommandona. Vi inkluderar en datorbildskärm i illustrationen så att du förstår sambandet mellan verkliga förhållanden (växelstängning och lampstatus) och programstatus (signaler via virtuella kontakter och virtuella spolar).
PLC: s verkliga kraft och mångsidighet avslöjas när vi vill ändra beteende hos kontrollsystemet. Eftersom PLC är en programmerbar enhet kan vi ändra kommandona som vi ställer in utan att konfigurera de komponenter som är anslutna till den igen. Anta att vi har beslutat att växla funktionen ”switch - lampa” tvärtom: tryck på knappen för att stänga av lampan och släpp den för att slå på den.
Lösningen på detta problem under verkliga förhållanden är att omkopplaren, "öppen" under normala förhållanden, ersätts av en "stängd". Programvarulösningen är att ändra programmet så att kontakten X1 under normala förhållanden är "stängd" och inte "öppen".
I följande bild ser du ett redan ändrat program, med omkopplaren inte aktiverad:
Och här är omkopplaren aktiverad:
En av fördelarna med att implementera logisk kontroll i programvara, i motsats till att styra hårdvara, är att insignalerna kan användas så många gånger som behövs. Tänk till exempel på en krets och ett program som är utformat för att slå på en glödlampa om minst två av de tre omkopplarna är aktiverade samtidigt:
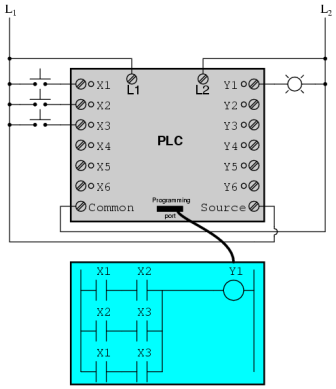
För att bygga en liknande krets med hjälp av ett relä krävs tre reläer med två öppna kontakter under normala förhållanden, som var och en måste användas. Men med PLC kan vi programmera så många stift för varje "X" -ingång som vi skulle vilja utan att lägga till någon extra utrustning (varje ingång och utgång ska inte uppta mer än 1 bit i PLC-digitalminnet) och ringa dem så många gånger som behövs .
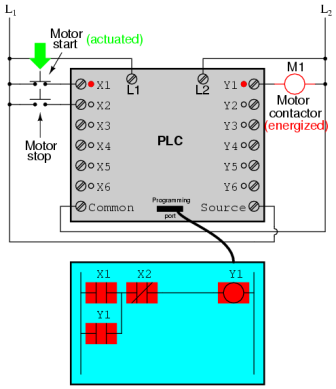
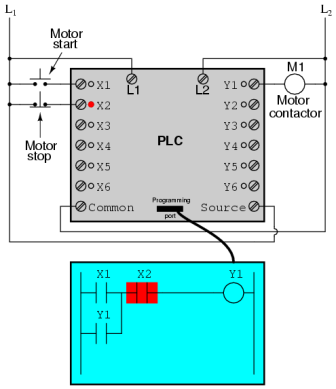
Dessutom, eftersom varje PLC-utgång inte har mer än en bit i sitt minne, kan vi lägga till kontakter till programmet och föra Y-utgången till ett inaktiverat tillstånd. Ta till exempel ett motordiagram med ett system för att kontrollera början av rörelse och stopp:
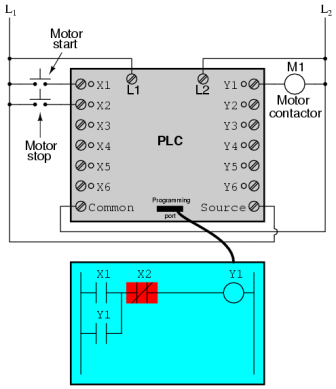
Strömbrytaren ansluten till ingång X1 fungerar som “Start” -knappen, medan omkopplaren ansluten till ingång X2 fungerar som “Stopp” -knappen. En annan kontakt, kallad Y1, som utskrift i kontakt, tillåter motorkontaktorn att förbli spänning även om du släpper startknappen. I det här fallet kan du se hur kontakten X2, "stängd" under normala förhållanden, visas i färgblocket och därigenom visar att den är i "stängd" ("elektriskt ledande") tillstånd.
Om du trycker på "Start" -knappen kommer en ström att passera genom den "stängda" kontakten X1 och den skickar 120 VAC till motorkontaktorn. Den parallella kontakten Y1 kommer också att "stänga" och därmed stänga kretsen:
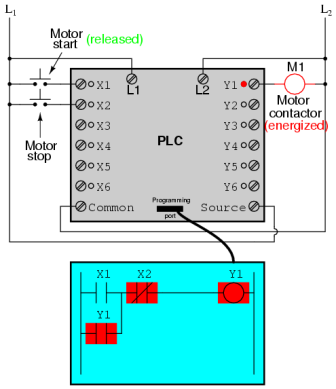
Om vi nu trycker på "Start" -knappen kommer kontakt X1 att gå i "öppet" -läge, men motorn fortsätter att fungera, eftersom den stängda kontakten Y1 fortfarande kommer att hålla spolen aktiverad:
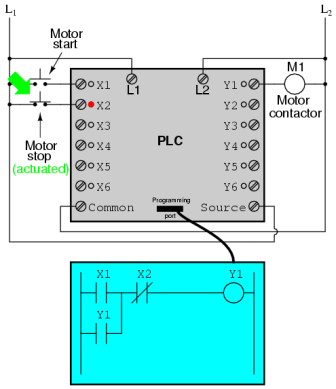
För att stoppa motorn måste du snabbt trycka på "Stopp" -knappen, som kommer att rapportera spänningen till ingången X1 och den "öppna" kontakten, vilket kommer att leda till avslutande av spänningsförsörjningen till spolen Y1:
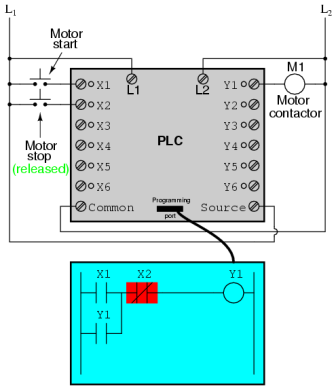
När du tryckte på “Stopp” -knappen lämnades ingång X1 utan spänning, varigenom kontakten X1 återfördes till sitt normala “stängda” tillstånd. Motorn går under inga omständigheter igen förrän du trycker på Start-knappen igen, eftersom utskriften i stift Y1 har gått förlorad:
En feltolerant modell av PLC-styrenheter är mycket viktigt, liksom med elektromekaniska reläkontrollanordningar. Det är alltid nödvändigt att ta hänsyn till effekten av en felaktig "öppen" kontakt på systemets drift. Så till exempel, i vårt fall, om kontakt X2 felaktigt "öppnas", finns det inget sätt att stoppa motorn!
Lösningen på detta problem är att omprogrammera kontakten X2 i PLC och faktiskt trycka på stoppknappen:
När “Stop” -knappen inte trycks in, aktiveras ingången till PLC X2, d.v.s. kontakten X2 är "stängd". Detta tillåter motorn att starta drift när strömmen kommuniceras till terminal X1, och att fortsätta arbeta när "Start" -knappen släpps. När du trycker på “Stopp” -knappen går kontakt X2 i “öppet” tillstånd och motorn slutar fungera. Således kan du se att det inte finns någon funktionell skillnad mellan den här och den tidigare modellen.
Men om ingångsterminalen X2 felaktigt "öppnades", kan ingången X2 stoppas genom att trycka på "Stopp" -knappen. Som ett resultat stängs motorn av omedelbart. Denna modell är säkrare än den föregående, där man trycker på “Stopp” -knappen omöjligt att stoppa motorn.
Förutom ingångarna (X) och utgångarna (Y) i PLC är det möjligt att använda “interna kontakter och spolar. De används på samma sätt som mellanreläer som används i standardreläkretsar.
För att förstå principen om driften av de "interna" kretsarna och kontakterna, överväg följande krets och program som har utvecklats på grundval av de tre ingångarna till OCH logisk funktion:
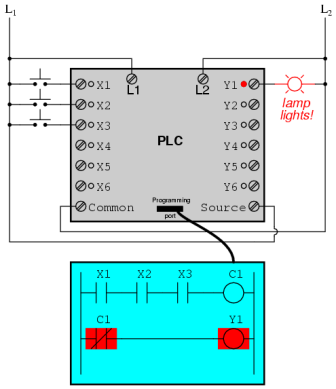
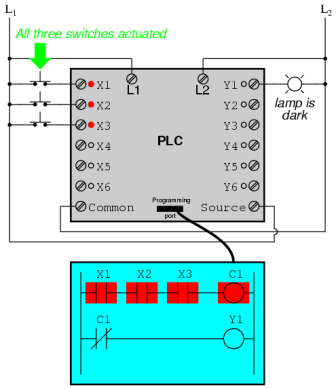
I denna krets är lampan tänd tills en av knapparna trycks in. För att stänga av lampan, tryck på alla tre knapparna:
Den här artikeln om programmerbara logiska kontroller illustrerar bara ett litet urval av deras kapacitet. Som PLC-dator kan den utföra andra avancerade funktioner med mycket större noggrannhet och tillförlitlighet än när man använder elektromekaniska logiska enheter. De flesta PLC: er har mer än sex ingångar och utgångar. Följande bild visar en av Allen-Bradleys PLC:

Med moduler, som var och en har 16 ingångar och utgångar, har denna PLC förmågan att styra ett dussin enheter.Att placera i ett PLC-styrskåp tar lite plats (för elektromekaniska reläer som utför samma funktioner krävs mycket mer ledigt utrymme).

En av fördelarna med PLC, som helt enkelt inte kan dupliceras med ett elektromekaniskt relä, är fjärrövervakning och styrning via datorns digitala nätverk. Eftersom en PLC inte är mer än en specialiserad digital dator, kan den enkelt "kommunicera" med andra datorer. Följande foto är en grafisk återgivning av vätskepåfyllningsprocessen (pumpstation för kommunal avloppsrening) kontrollerad av en PLC. Dessutom ligger själva stationen några kilometer från datorskärmen.
Se även på elektrohomepro.com
: