Kategori: Artikel Pilihan » Elektronik Praktikal
Bilangan pandangan: 162,237
Komen pada artikel: 4
Bagaimana untuk membuat penyesuaian masa do-it-yourself
 Apakah masa penyampai? Algoritma tindakan penyampai masa cukup mudah, tetapi kadangkala ia boleh menyebabkan kekaguman. Sekiranya kita mengingati mesin basuh lama, yang dipanggil dengan "baldi dengan motor", maka tindakan pemasa itu sangat jelas: mereka memutarkan tombol beberapa kutu, sesuatu yang mula menandakan di dalam, dan enjin bermula.
Apakah masa penyampai? Algoritma tindakan penyampai masa cukup mudah, tetapi kadangkala ia boleh menyebabkan kekaguman. Sekiranya kita mengingati mesin basuh lama, yang dipanggil dengan "baldi dengan motor", maka tindakan pemasa itu sangat jelas: mereka memutarkan tombol beberapa kutu, sesuatu yang mula menandakan di dalam, dan enjin bermula.
Sebaik sahaja penunjuk pemegang mencapai bahagian sifar skala, basuh itu berakhir. Kemudian, kereta dengan dua pemasa muncul - mencuci dan berputar. Dalam mesin sedemikian, geganti masa dibuat dalam bentuk silinder logam, di mana mekanisme jam tersembunyi, dan di luar terdapat hanya kenalan elektrik dan tombol kawalan.
Mesin basuh moden - mesin automatik (dengan kawalan elektronik) juga mempunyai relay masa, dan menjadi mustahil untuk menjadikannya sebagai elemen atau bahagian yang berasingan pada papan kawalan. Semua kelewatan masa diperolehi dari pemrograman menggunakan mikrokontroler kawalan. Jika anda melihat dengan teliti pada kitaran mesin basuh automatik, bilangan penangguhan masa tidak dapat dikira. Jika semua kelewatan masa ini dilakukan dalam bentuk mekanisme jam yang disebutkan di atas, maka tidak akan cukup ruang di dalam badan mesin basuh.
Penyampai masa ia digunakan bukan sahaja di mesin basuh, contohnya, dalam ketuhar gelombang mikro, dengan bantuan kelewatan masa bukan sahaja waktu operasi dikawal, tetapi juga kuasa pemanasan. Ini dilakukan seperti berikut: voltan RF menyala selama 5 saat dan dimatikan selama 5. Kuasa pemanasan purata dalam kes ini adalah 50%. Untuk mendapatkan kuasa 30%, menghidupkan RF selama 3 saat sudah mencukupi. Oleh itu, di luar negeri, lampu frekuensi tinggi terletak selama 7 saat. Sudah tentu, angka-angka ini boleh berbeza, sebagai contoh, 50 dan 50 atau 30 dan 70, di sini nisbah masa pematian HF ditunjukkan.
Sebutharga mesin basuh lama diberi alasan. Di sini, dalam contoh ini, anda dapat melihat, walaupun merasa dengan tangan anda, bagaimana masa penyambungan berfungsi.
Mengganti engkol mengikut arah jam adalah tidak lebih daripada kelajuan pengatup. Penggerak (motor elektrik) segera dihidupkan. Kelajuan pengatup, dalam kes ini dalam beberapa minit, menentukan sudut putaran pemegang. Oleh itu, dua tindakan dilakukan sekali gus: memuat masa pendedahan dan sebenarnya memulakan kelewatan masa itu sendiri. Selepas masa ditetapkan telah berlalu, penggerak dimatikan. Semua masa geganti atau pemasa berfungsi walaupun kira-kira, bahkan yang tersembunyi di dalamnya mikrokontroler (MK).
Dari jam kerja ke elektronik
Bagaimana untuk mendapatkan kelewatan masa menggunakan MK
Kelajuan MK moden sangat tinggi, sehingga beberapa puluhan perut (berjuta-juta operasi sesaat). Nampaknya tidak lama dahulu ada satu perjuangan untuk 1 mips pada komputer peribadi. Sekarang MKs usang, contohnya, keluarga 8051, dengan mudah memenuhi 1 mips ini. Oleh itu, ia akan mengambil masa satu saat untuk menyelesaikan 1,000,000 operasi.
Di sini, penyelesaian yang seolah-olah siap, bagaimana untuk mendapatkan kelewatan masa. Lakukan operasi yang sama sejuta kali. Ini boleh dilakukan sekiranya operasi ini dilengkapkan dalam program ini. Tetapi masalahnya adalah bahawa sebagai tambahan kepada operasi ini, MK sebentar lagi tidak dapat melakukan apa-apa lagi. Di sini anda mempunyai pencapaian kejuruteraan, di sini anda mempunyai mips! Dan jika anda memerlukan kelajuan pengatup beberapa puluhan detik atau minit?
Pemasa - peranti untuk mengira masa
Untuk mengelakkan rasa malu itu, pemproses tidak memanaskan seperti itu, melaksanakan perintah yang tidak perlu yang tidak akan melakukan apa-apa yang berguna, pemasa telah dibina ke dalam MK, sebagai peraturan, beberapa daripada mereka.Jika anda tidak memasuki butiran, maka pemasa adalah kaunter binari yang menghitung denyutan yang dijana oleh litar khas di dalam MK.
Sebagai contoh, dalam keluarga MK 8051, denyutan mengira dijana apabila setiap arahan dilaksanakan, iaitu. pemasa hanya mengira bilangan arahan mesin yang dilaksanakan. Sementara itu, unit pemprosesan pusat (CPU) secara senyap-senyap terlibat dalam pelaksanaan program utama.
Katakan bahawa pemasa mula mengira (terdapat arahan permulaan untuk ini) dari sifar. Setiap nadi meningkatkan kandungan kaunter dengan satu dan, akhirnya, mencapai nilai maksimum. Selepas itu, kandungan kaunter adalah semula. Masa ini dipanggil "limpahan melawan". Ini adalah tepat pada penghujung masa (ingat mesin basuh).
Katakan bahawa pemasa adalah 8-bit, maka ia boleh digunakan untuk mengira nilai dalam julat 0 ... 255, atau kaunter akan melimpah setiap 256 denyutan. Untuk menjadikan kelajuan pengatup lebih pendek, sudah cukup untuk memulakan kiraan bukan dari awal, tetapi dari nilai yang berbeza. Untuk mendapatkannya, sudah cukup untuk memuatkan nilai ini ke dalam kaunter, dan kemudian memulakan kaunter (sekali lagi, ingat mesin basuh). Nombor preloaded ini adalah sudut putaran relay masa.
Pemasa sedemikian dengan kekerapan operasi 1 mips akan membolehkan anda untuk mendapatkan kelajuan pengatup maksima 255 mikroseconds, tetapi anda memerlukan beberapa saat atau bahkan beberapa minit, apa yang perlu anda lakukan?
Ternyata semuanya sangat mudah. Limpahan setiap pemasa adalah peristiwa yang menyebabkan program utama terganggu. Akibatnya, CPU beralih ke subprogram yang sepadan, yang mana petikan kecil itu boleh menambah apa-apa, sekurang-kurangnya sehingga beberapa jam dan bahkan hari.
Rutin perkhidmatan interupsi biasanya pendek, tidak lebih dari beberapa arahan sedozen, dan selepas itu kembali ada program utama, yang terus berjalan dari tempat yang sama. Cuba petikan ini dengan pengulangan yang mudah dari arahan yang dikatakan di atas! Walaupun, dalam beberapa kes, anda perlu berbuat demikian.
Untuk melakukan ini, terdapat perintah NOP dalam sistem perintah pemproses, yang tidak dilakukan apa-apa, ia hanya memerlukan masa mesin. Ia boleh digunakan untuk menyimpan ingatan, dan apabila membuat penangguhan masa, hanya sangat pendek, mengikut susunan beberapa mikrodetik.
Ya, pembaca akan mengatakan bagaimana dia menderita! Dari mesin basuh terus ke mikrokontroler. Dan apakah antara titik-titik yang melampau ini?
Apakah masa penyegerakan?
Seperti yang telah disebutkan, Tugas utama penyambungan masa adalah untuk mendapatkan kelewatan antara isyarat input dan isyarat keluaran. Kelewatan ini boleh dihasilkan dalam beberapa cara. Relay masa adalah mekanikal (yang telah diterangkan pada permulaan artikel), elektromekanik (juga berdasarkan kerja-kerja jam, hanya mata air yang digulung oleh elektromagnet), serta dengan pelbagai peranti redaman. Satu contoh relay seperti itu adalah suis masa pneumatik yang ditunjukkan dalam Rajah 1.

Lukisan 1. Relay masa pneumatik.
Relay terdiri daripada pemacu elektromagnetik dan lampiran pneumatik. Gegelung relay boleh didapati pada voltan operasi 12 ... 660V AC (16 penilaian total) dengan kekerapan 50 ... 60Hz. Bergantung kepada versi relay, kelajuan pengatup boleh bermula sama ada apabila ia dicetuskan atau apabila pemacu elektromagnetik dilepaskan.
Masa ditetapkan oleh skru yang mengawal seksyen salib lubang untuk udara untuk keluar dari ruang. Relai masa yang digambarkan berbeza dengan parameter yang tidak stabil, oleh itu, jika boleh, relay masa elektronik sentiasa digunakan. Pada masa ini, geganti sedemikian, baik mekanikal dan pneumatik, boleh didapati hanya dalam peralatan kuno, yang belum diganti dengan peralatan moden, dan bahkan di muzium.
Penyegerakan masa elektronik
Mungkin salah satu yang paling biasa ialah siri 64 relay VL-60 dan beberapa yang lain, contohnya, VL-100 ... 140 relay.Semua pemasa ini dibina di atas cip khusus KR512PS10. Penampilan relay talian overhead ditunjukkan dalam Rajah 2.

Rajah 2. Siri relay masa VL.
Litar penghantar masa VL - 64 ditunjukkan dalam Rajah 3.

Rajah 3 Skim pemasa VL - 64
Apabila voltan dibekalkan ke input melalui jambatan penerus VD1 ... VD4, voltan melalui penstabil pada transistor KT315A dibekalkan kepada cip DD1, penjana dalaman yang mula menghasilkan denyutan. Kekerapan nadi dikawal oleh resistor yang berubah-ubah PPB-3B (ia adalah yang dipamerkan di panel depan relay), disambungkan secara bersiri dengan kapasitor pemasaan 5100 pF, yang mempunyai toleransi 1% dan TKE yang sangat kecil.
Denyutan yang diterima dikira oleh kaunter dengan pekali bahagian pembolehubah, yang ditetapkan dengan menukar terminal microcircuit M01 ... M05. Dalam relay siri VL, penukaran ini dilakukan di kilang. Nisbah bahagian maksimum dari keseluruhan kaunter mencapai 235.929.600 Menurut dokumentasi untuk mikrokitar, pada frekuensi osilator induk 1 Hz, kecepatan pengatup dapat mencapai lebih dari 9 bulan! Menurut pemaju, ini cukup untuk apa-apa permohonan.
Pin 10 dari cip END adalah akhir kelajuan pengatup, disambungkan ke input 3 - ST start - stop. Sebaik sahaja voltan paras tinggi muncul pada output END, penghitungan nadi berhenti, dan voltan tahap tinggi muncul pada output ke-9 Q1, yang akan membuka transistor KT605 dan relay yang disambungkan kepada pengumpul KT605 akan pergi.
Relay masa moden
Sebagai peraturan, dibuat pada MK. Adalah lebih mudah untuk memprogramkan microcircuit proprietari siap pakai, menambah beberapa butang, penunjuk digital, daripada mencipta sesuatu yang baru, dan kemudian juga terlibat dalam penalaan masa. Relay sedemikian ditunjukkan dalam Rajah 4.

Rajah 4 Relay masa mikrokontroler
Mengapa melakukan penyambungan masa do-it-yourself?
Dan walaupun terdapat sejumlah besar suis masa, hampir untuk setiap selera, kadang-kadang di rumah, anda perlu melakukan sesuatu yang anda sendiri, selalunya sangat mudah. Tetapi reka bentuk itu sering membenarkan diri mereka sepenuhnya dan sepenuhnya. Berikut adalah sebahagian daripada mereka.
Sebaik sahaja kita hanya memeriksa operasi microcircuit KR512PS10 sebagai sebahagian daripada geganti talian overhead, kita perlu mula mempertimbangkan litar amatur daripadanya. Rajah 5 menunjukkan litar pemasa.

Rajah 5. Pemasa pada microcircuit KR524PS10.
Mikroelektrik ini dikuasakan dari penstabil parametrik R4, VD1 dengan voltan penstabilan sekitar 5 V. Pada masa kuasa, litar R1C1 menghasilkan nadi semula mikrosircuit. Ini memulakan penjana dalaman, frekuensi yang ditetapkan oleh rantai R2C2 dan kaunter dalaman mikrosirkuit mula mengira denyutan.
Bilangan denyutan ini (nisbah pembahagi counter) ditetapkan dengan menukar terminal microcircuit M01 ... M05. Dengan kedudukan yang ditunjukkan dalam gambar rajah, pekali ini akan menjadi 78643200. Bilangan denyutan ini membentuk tempoh penuh isyarat pada output END (pin 10). Pin 10 disambungkan ke pin 3 ST (mula / berhenti).
Sebaik sahaja output END ditetapkan ke tahap yang tinggi (setengah tempoh telah dikira), kaunter berhenti. Pada masa yang sama, output Q1 (pin 9) juga menetapkan paras yang tinggi, yang membuka transistor VT1. Melalui transistor terbuka, relay K1 dihidupkan, yang mengawal beban dengan kenalannya.
Untuk memulakan penangguhan masa, sudah cukup untuk seketika mematikan dan terus menyampaikan semula. Gambarajah masa isyarat END dan Q1 ditunjukkan dalam Rajah 6.

Rajah 6. Gambarajah pemasaan isyarat END dan Q1.
Dengan nilai rantai masa R2C2 yang ditunjukkan pada gambar rajah, frekuensi penjana adalah kira-kira 1000 Hz. Oleh itu, kelewatan masa bagi sambungan sambungan terminal M01 ... M05 adalah kira-kira sepuluh jam.
Untuk menyempurnakan kelajuan pengatup ini, berikut perlu dilakukan. Sambungkan terminal M01 ... M05 ke kedudukan "Seconds_10", seperti yang ditunjukkan dalam jadual dalam angka tersebut 7.
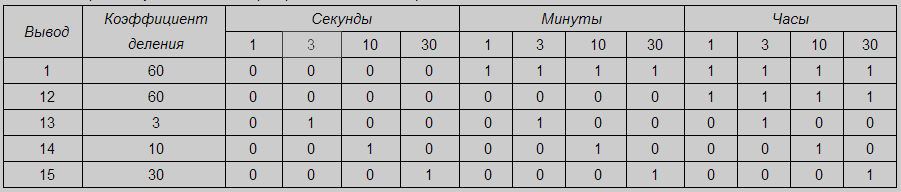
Rajah 7. Jadual penetapan pemasa (klik pada gambar untuk memperbesar).
Dengan sambungan ini, putar resistor ubah R2 untuk menyesuaikan kelajuan pengatup selama 10 saat. dengan jam randik. Kemudian sambungkan terminal M01 ... M05, seperti yang ditunjukkan dalam gambar rajah.
Rajah lain pada KR512PS10 ditunjukkan dalam Rajah 8.

Rajah 8 Relay masa cip KR512PS10
Pemasa lain pada cip KR512PS10.
Untuk memulakan, kami memberi perhatian kepada KR512PS10, lebih tepat lagi, kepada isyarat END, yang tidak ditunjukkan sama sekali, dan isyarat ST, yang hanya disambungkan kepada wayar biasa, yang sepadan dengan tahap logik sifar.
Dengan pertukaran ini, kaunter tidak akan berhenti, seperti yang ditunjukkan dalam Rajah 6. Isyarat END dan Q1 akan secara kitaran, tanpa henti, terus. Bentuk isyarat ini akan menjadi jambatan klasik. Oleh itu, ternyata hanya penjana denyutan empat segi, frekuensi yang boleh dikawal oleh perintang variabel R2, dan faktor pembahagi counter boleh ditetapkan mengikut jadual yang ditunjukkan dalam Rajah 7.
Denyutan berterusan dari output Q1 pergi ke input pengiraan kaunter desimal - penyahkod DD2 K561IE8. Rangkaian R4C5, apabila dihidupkan, mengeset semula kaunter kepada sifar. Akibatnya, tahap tinggi muncul pada output decoder "0" (pin 3). Pada output 1 ... 9 tahap rendah. Dengan ketibaan denyut nadi yang pertama, tahap tinggi bergerak ke output "1", nadi kedua menetapkan tahap tinggi pada output "2" dan seterusnya, sehingga output "9". Kemudian kaunter meluap dan kitaran pengiraan bermula lagi.
Isyarat kawalan yang terhasil melalui suis SA1 boleh diberi kepada penjana bunyi pada unsur-unsur DD3.1 ... 4, atau ke penguat geganti VT2. Jumlah kelewatan masa bergantung pada kedudukan suis SA1. Dengan sambungan terminal M01 ... M05 yang ditunjukkan pada gambar rajah dan parameter rantai waktu R2C2, adalah mungkin untuk mendapatkan kelewatan masa antara 30 saat hingga 9 jam.
Boris Aladyshkin
Lihat juga di i.electricianexp.com
: