Kategorien: Elektrikeranfänger, Elektromotoren und ihre Anwendung
Anzahl der Ansichten: 8782
Kommentare zum Artikel: 0
Motorklassifizierung
Abhängig vom Zweck, von den erwarteten Betriebsarten und -bedingungen, von der Art der Stromversorgung usw. können alle Elektromotoren nach verschiedenen Parametern klassifiziert werden: nach dem Prinzip der Ermittlung des Betriebsmoments, nach der Funktionsweise, nach der Art des Versorgungsstroms, nach der Methode der Phasenregelung, nach Art der Erregung usw. Betrachten wir die Klassifizierung von Elektromotoren genauer.

Auftreten von Drehmoment
Das Drehmoment in Elektromotoren kann auf zwei Arten erhalten werden: nach dem Prinzip der magnetischen Hysterese oder rein magnetoelektrisch. Hysteresemotor erhält ein Drehmoment durch die Hysterese während der Magnetisierungsumkehr eines magnetisch festen Rotors, während magnetoelektrischer Motor Das Drehmoment ist das Ergebnis des Zusammenspiels der expliziten Magnetpole von Rotor und Stator.

Heute machen magnetoelektrische Motoren zu Recht den Löwenanteil der gesamten Fülle an Elektromotoren aus, die in so vielen Bereichen eingesetzt werden. Sie werden durch die Art des Versorgungsstroms unterteilt in:
-
Gleichstrommotoren
-
Wechselstrommotoren
-
Universalmotoren.
Im Gegensatz zu einem magnetoelektrischen Motor ist die Magnetisierung des Rotors relativ zu seinen geometrischen Achsen im Hysteresemotor zulässig, und dieses besondere Merkmal erlaubt es nicht, die allgemeinen Gesetze der magnetoelektrischen Umwandlung auf den Synchronbetriebsmodus des Hysteresemotors auszudehnen.
Beobachten - Vorrichtung und Wirkprinzip des einfachsten Elektromotors und Wie man einen einfachen Elektromotor in 10 Minuten macht

Motorklassifizierung
Gleichstrommotoren

Bei einem Motor, der mit Gleichstrom betrieben wird, ist der Motor selbst für das Schalten der Phasen verantwortlich. Dies bedeutet, dass, obwohl der elektrischen Maschine ein Gleichstrom zugeführt wird, das Magnetfeld aufgrund der Wirkung der internen Mechanismen der Vorrichtung das Rotordrehmoment aufrechterhalten kann (als ob ein Wechselstrom in der Statorwicklung wirkt).

Das Gerät und die Funktionsweise des Gleichstrommotors: 1 - Anker, 2 - Welle, 3 - Kollektorplatten, 4 - Bürstenbaugruppe, 5 - Ankermagnetkreis, 6 - Induktormagnetkreis, 7 - Feldwicklungen, 8 - Induktorkörper, 9 - Seitenabdeckungen 10 - Lüfter, 11 - Fuß, 12 - Lager.
Ein Gleichstrommotor besteht aus einem festen Teil, der als Induktor bezeichnet wird, und einem beweglichen Teil, der als Anker bezeichnet wird. Je nach Ausführung können sich Permanentmagnete am Induktor des Induktors befinden. Dies vereinfacht die Ausführung, ermöglicht jedoch nicht die Einstellung des Magnetflusses des Motors, der sich auf dessen Drehzahl auswirkt.
Durch die Methode zur Erzeugung eines sich bewegenden Magnetfelds werden Gleichstrommotoren unterteilt in:
-
Ventil (bürstenlos)
-
Sammler.
Bürstenlose Motoren haben elektronische Wechselrichter in ihrer Konstruktion, die eine Phasenumschaltung durchführen. Kollektormotoren sind traditionell ausgestattet Bürstensammeleinheiten, die so konstruiert sind, dass sie die Leistung der Motorwicklungen rein mechanisch mit der Drehung ihrer beweglichen Teile synchronisieren.
Erregung von Kollektormotoren

Nach der Erregungsmethode gibt es folgende Arten von Kollektormotoren: mit unabhängiger Erregung durch Permanentmagnete oder Elektromagnete oder mit Selbsterregung. Permanentmagnet-Erregungsmotoren enthalten Magnete am Rotor.Selbsterregte Motoren haben eine spezielle Ankerwicklung am Rotor, die parallel, nacheinander oder gemischt mit einer speziellen Erregerwicklung geschaltet werden kann.
Welligkeitsmotor
Ein gepulster Strommotor ähnelt einem Gleichstrommotor. Der Unterschied liegt im Vorhandensein von ausgekleideten Einsätzen am Kern sowie zusätzlichen ausgekleideten Polen. Zusätzlich hat der Welligkeitsstrommotor eine Ausgleichswicklung. Solche Motoren werden in elektrischen Lokomotiven eingesetzt, wo sie üblicherweise angetrieben werden gleichgerichteter Wechselstrom.
Wechselstrommotor
Wechselstrommotoren werden, wie der Name schon sagt, mit Wechselstrom betrieben. Sie sind synchron und asynchron.
Bei Synchron-Wechselstrommotoren bewegt sich das Statormagnetfeld mit der gleichen Winkelgeschwindigkeit wie der Rotor, während Asynchronmotoren immer eine gewisse Verzögerung aufweisen (gekennzeichnet durch den Schlupfwert s) - das Statormagnetfeld scheint in seiner Bewegung vor dem Rotor zu sein, was wiederum immer der Fall ist sucht ihn einzuholen.
Hochleistungssynchronmotoren (mit einer Leistung von Hunderten von Kilowatt) haben Feldwicklungen am Rotor. Die Rotoren weniger leistungsstarker Synchronmotoren sind mit Permanentmagneten ausgestattet, die die Pole bilden. Grundsätzlich sind auch Hysteresemotoren synchron.
Schrittmotoren - Dies ist eine spezielle Kategorie von Synchronmotoren mit hochpräziser Steuerung der Drehzahl bis hin zur diskreten Schrittzählung.
Ventilsynchronstrahltriebwerke werden über einen Wechselrichter angetrieben.Siehe dieses Thema:Moderne Synchronstrahltriebwerke

Asynchrone Wechselstrommotoren zeichnen sich dadurch aus, dass ihre Drehwinkelgeschwindigkeit des Rotors immer geringer ist als die Drehgeschwindigkeit des Statormagnetfeldes. Induktionsmotoren sind einphasig (mit Anlaufwicklung), zweiphasig (ein Kondensatormotor gilt auch für sie), dreiphasig und mehrphasig.
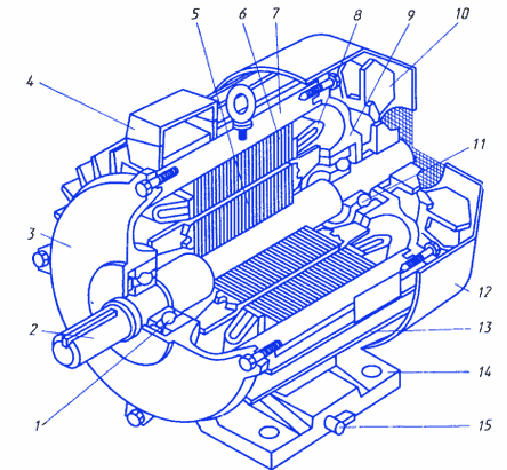
Dreiphasen-Käfigläufer-Induktionsmotor
Ein asynchroner Elektromotor besteht sowohl aus einem festen (Stator) Teil als auch einem beweglichen (Rotor) Teil, die von Lagern 1 und 11 gehalten werden, die in den Seitenabdeckungen 3 und 9 installiert sind. Der Rotor besteht aus einer Welle 2, auf der ein Magnetkreis 5 mit einer Wicklung befestigt ist. Der Motorstator besteht aus einem Gehäuse 7, an dem ein Magnetkreis 6 angebracht ist. In die Nuten des Magnetkreises 8 ist eine dreiphasige Wicklung eingelegt. Die Klemmenkastenabdeckung 4 und die Laufradschutzabdeckung 12 sind ebenfalls an dem Gehäuse angebracht.
Der Phasenrotor hat eine dreiphasige Wicklung, die durch die Art der Statorwicklung hergestellt wird. Einige Enden der Spulen sind mit dem Nullpunkt ("Stern") verbunden, während andere mit den Schleifringen verbunden sind. Auf die Ringe werden Bürsten aufgebracht, die einen Gleitkontakt mit der Rotorwicklung herstellen. Mit dieser Konstruktion ist es möglich, einen Anlauf- oder Einstellrheostaten an die Rotorwicklung anzuschließen, wodurch der elektrische Widerstand im Rotorkreis geändert werden kann.
Siehe auch - Unterschiede zwischen Induktionsmotoren und Gleichstrommotoren, Unterschiede zwischen Käfigläufermotoren und phasenverriegelten Induktionsmotoren
Asynchronmotor mit Frequenzumrichter zur reibungslosen Steuerung der Wellendrehzahl aufgrund von Frequenz- und Versorgungsspannungsänderungen:

Universalbürstenmotoren
Der Universalkollektormotor kann zumindest mit Wechselstrom (50 Hz) mindestens mit Gleichstrom betrieben werden. Hat serielle Erregung, wird verwendet in elektrischen Haushaltsgerätenwo eine Drehzahl höher als das Maximum für herkömmliche Wechselstrommotoren von 3000 U / min erforderlich ist. Die Leistung solcher Motoren überschreitet in der Regel 200 Watt nicht. Trifft sich Thyristorsteuerung universelle Motordrehzahl.
Eine verbesserte Version des Universalmotors ist ein Synchronmotor mit einem Rotorpositionssensor, bei dem ein elektronischer Wechselrichter die Rolle des Kollektors spielt.
Weitere nützliche Artikel zu diesem Thema:
Arten von Elektromotoren und die Prinzipien ihrer Arbeit
Eigenschaften von Induktionsmotoren
So bestimmen Sie die Drehzahl eines Elektromotors
So überprüfen Sie den Elektromotor
So zerlegen Sie einen Induktionsmotor
Arten und Anordnung der Umdrehungen der Motordrehzahl des Kollektors
Siehe auch auf i.electricianexp.com
: